[일반] 자이로센서 roll, pitch, yaw 데이터 처리 구조 #1
- Link
- https://m.blog.naver.com/yuninjae1234/220935189584133
- https://www.now0930.pe.kr/wordpress/wp-content/uploads/2017/01/AN3461.pdf117
고양이 프로젝트를 진행하면서 초기 자이로 센서를 MPU6050 모듈(1,500원)을 사용하여 제작 하였으나 회로를 구성하여 PCB 제작시 부품이 (8,000원)으로 너무 비싼듯 하여 LSM6D33 (2,000원)으로 대체 하게 되었다.

헬박사님 왈 단품이 비싸면 모듈을 사서 해당 부품을 때서 사용
문제는 MPU6050의 roll, pitch, yaw 코드가 있어 활용 하였으나 LSM6D33 해당 코드가 없어 계속 구글링 중 포기 하고 천천히 관련 기능 구현 해보려고 한다.
Roll, Pitch, Yaw
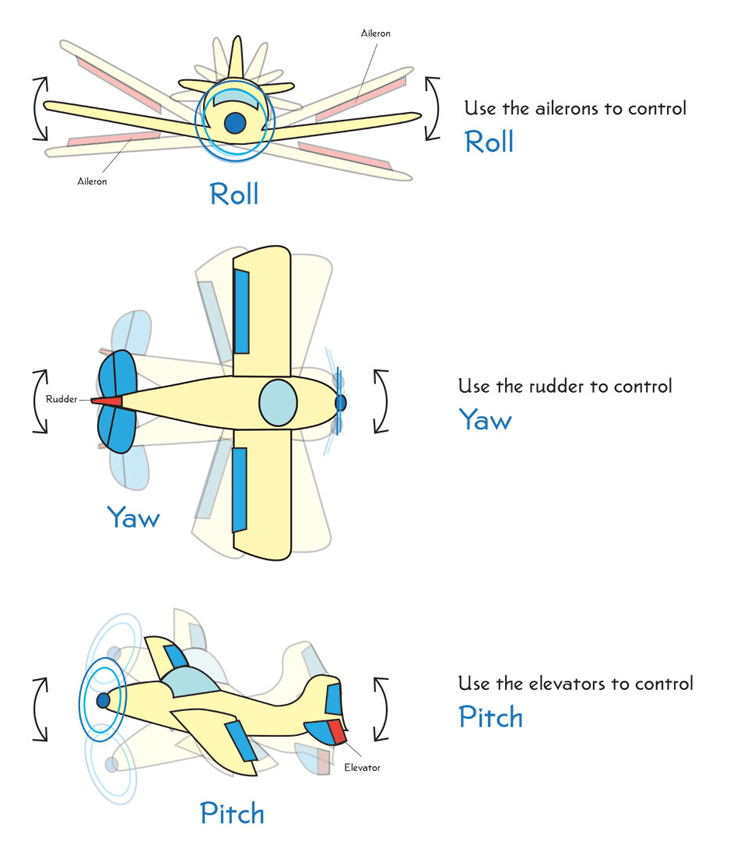
pitch : x축에 대한 회전 (끄덕끄덕)
roll : y축에 대한 회전 (갸웃갸웃)
yaw : z축에 대한 회전 (도리도리)
링크의 블로그 (토발즐)님의 글에 따르면 자이로센서는 보통 시중에 파는 IMU(관성 측정 장치)와 AHRS(센서 융합기) 나누어짐
IMU는 각속도계(자이로스코프 ?), 가속도계, 지자기계, 온도, 압력 등의 센서로 구성됨
AHRS는 위의 IMU모듈을 포함하여 MCU를 포함 MCU에선 센서들의 데이터를 이용하여 Roll, Pitch, Yaw값을 계산
MPU6050 IMU

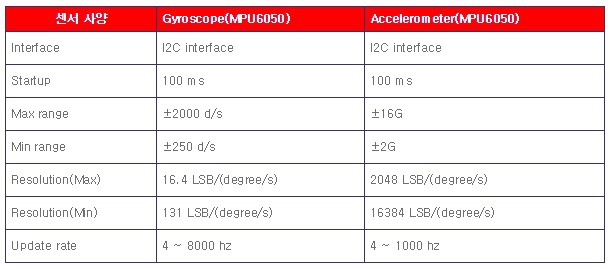
MPU6050은 자이로와 가속도 센서와 I2C 인터페이스 제공
LSM6D33 IMU
Specifications
- Dimensions: 0.4″ × 0.9″ × 0.1″ (10 × 23 × 3 mm)
- Weight without header pins: 0.6 g (0.02 oz)
- Operating voltage: 2.5 V to 5.5 V
- Supply current: 2 mA
Output format (I²C/SPI):
- Accelerometer: one 16-bit reading per axis
- Gyro: one 16-bit reading per axis
Sensitivity range (configurable):
- Accelerometer: ±2, ±4, ±8, or ±16 g
- Gyro: ±125, ±245, ±500, ±1000, or ±2000°/s
자이로, 가속도, 온도 센서와 I2C / SPI 인터페이스 제공
MCU를 사용하여 AHRS구현
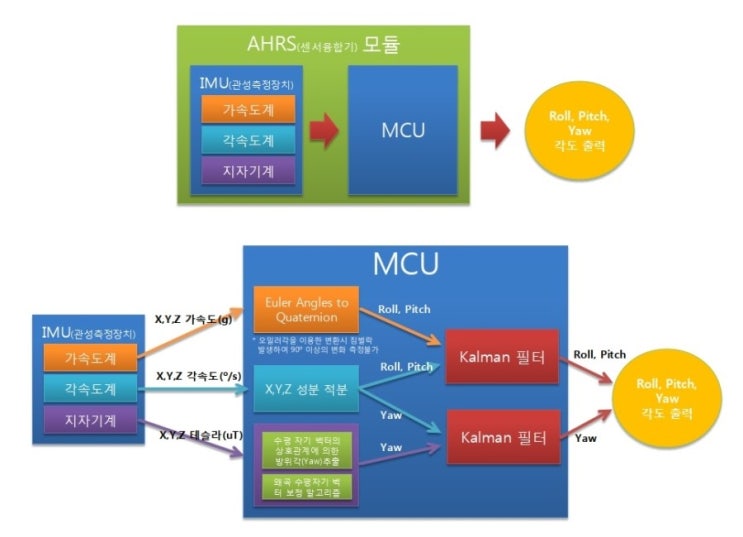
각속도계(자이로) 출력값을 적분 (걸린시간을 곱해줌) 하면 우리가 원하는 Roll, Pitch, Yaw를 구할수 있으나 오류 부정을 위하 가속계와 지자기계를 같이 사용한다.
가속도는 중력에 의한 Roll, Pitch 절대각을 구할수 있는 Yaw는 불가능 (Z축을 기준으로 움직이면 중력 가속도의 변화가 없기 때문)
가속도 센서 : 오일러 각을 이용한 Roll, Pitch각을 구하는 공식
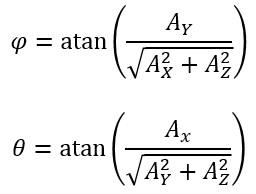
C언어 코드를 구현 (ax, ay, az는 각각 가속도 값)
90도 이상 움직일 경우 짐벌락이 발생하기 때문에 Euler Angle to Quaternion해줘야 된다는 자료를 찾아서 업데이트 예정
추가작업 : 자이로 센서 값 이용 방법과 필터 구현에 대해서도 추가 자료 업데이트 예정

메이커 스토리
최근 게시물





Tag Clouds